PID制御program
実験2 PID制御による軌道追従
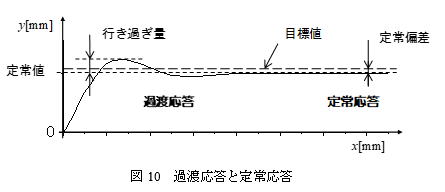
PID制御を用いてステップ状の目標軌道yrに追従させましょう.自動車の運転でいうところのレーンチェンジです.並進速度についてはすでにPI制御でおおよそ一定速度になっています.この実験では,制御ゲインによって軌道がどう変わるかを調べます.このとき,図10の過渡応答(行き過ぎ量,速応性),定常応答(定常偏差)といったポイントについて比較しましょう.
実験2で使うPID制御の説明
目標軌道に追従させるために,目標軌道と現在のロボットのy座標との差に応じてロボットの向きを変えるように旋回方向の入力u2を決めよう.目標値yrと今の位置y(t)との偏差を,
![]()
とおく.前節の並進速度の制御と同じようにPI制御を用いると,
![]()
である.kP,kIはそれぞれ,比例ゲイン,積分ゲインである.
ところで,もし順調に目標に近づきつつある状況,つまり偏差が減少し続けている状況ならば,それ以上入力を増やさなくても自然に目標に到達するかもしれない.逆に目標から遠ざかって偏差が増加し続けている状況ならば,もっと大きな入力を入れたほうが早く目標に近づくかもしれない.このような考えにもとづいて現時点での変化量,つまり微分を用いて制御する方法を微分制御(derivative control)という.
![]()
kDは微分ゲインである.(13)式のように比例,積分,および微分要素を組み合わせたものをPID制御と呼ぶ.
実験手順
0. PCとロボットをつなぎます.(PCの右側のUSBポートに接続)
- VCforRobodesignerCOM*.exeを実行します.
もしもポートが見つかりませんというメッセージが出たら,プログラムを終了し,ロボットがつながっているUSBポートを確認してから,プログラムを再起動してください.
- PC画面で「PID制御」をクリックします.
- Control gainsの数字を入力します(図11).
例:kp = 30 ki = 10 kd = 45
- 目標速度を入力します(単位はmm/s,デフォルト値は100mm/sです).
例:vd = 100 mm/s
- 目標軌道を入力します(単位はmm).
例:y(x) = 100 mm
- 停止させるx軸方向の位置を入力します(単位はmm,デフォルト値は500mmです.走行できる場所があれば長くしても構いません).
例:xが 500 mmに到達したら停止します.
- 「パラメータ送信」ボタンをクリックします.メッセージにしたがって,ロボットの周囲を片付けたら,メッセージウィンドウを閉じます.
この際,パラメータの値を入れ忘れていたり,画面上の注意事項にあっていないと,「パラメータの範囲は**です」というメッセージが出ます.この場合は10)に飛んでプログラムを終了し,再び1)からやり直しです.
- ロボットの基板の真ん中付近にあるpushボタンを押します(図9 Ⓐ).0.5秒後にロボットが動き出します.ロボットはy軸+方向,つまりロボットの左方向へ動くはずです.ケーブルがひっかからないように注意してください.PC画面にロボットの軌道が表示されます.
- PC画面のグラフをWindowsのSnipping ToolやPaintなどを用いて保存してください.数値データについても実験1と同様に保存されています.
- PCのソフトウェアを終了します.
- ロボットのリセットボタンを押します(図9 Ⓑ)←忘れずに!
- 1)から11)の手順を繰り返して軌道を比較します.この際,3)のゲインの値を変更して,ゲインと軌道の関係を考察しましょう.
- 12)の結果にもとづいて,オーバーシュートがなく,できるだけ速く目標軌道に追従するようなゲインの組み合わせを探してみましょう.
※ 一番ゴールに近い組み合わせのものを基準にすると良いです.変更できるゲインは3つです.このように変更できるパラメータが複数ある場合に,同時に複数のパラメータを変更してしまうと高確率でドツボにはまります.地道にメモを取りながら,ゲインを一つずつ変更していくのが良いと思います.
- 13)のゲインを用いて,4)の目標速度を50mm/s,150mm/sに変更して,100mm/sのときと軌道を比較しましょう.
結果と考察
- 結果2
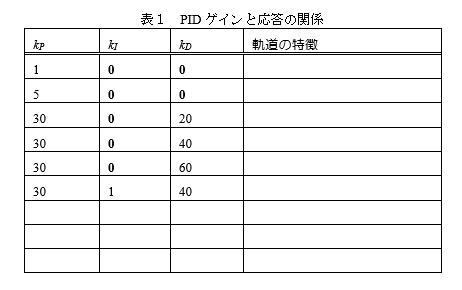
・ゲインをいろいろ変えて走行軌道をグラフにし,比例,積分,微分ゲインの値と軌道の関係を表1のようにまとめましょう.そのうえで,各ゲインの大きさと軌道の関係をまとめてみましょう.
・目標速度を変更したときの走行軌道を比較しましょう. - 考察2
・PID制御の各要素の役割が知られています.本などに記載されているその特徴と,実験で得られた軌道との関係を考察しましょう.
・軌道を制御する入力(13)とそのゲインが同じでも,目標の並進速度を変えると軌道が変わってしまう理由について考察しましょう.