制御なしprogram
実験1 軌道制御をしていないときのロボットの特性を調べる
フィードバック制御を行っていない状態で,左右のモータに同じ指令値を与えたときのロボットの動きを確かめます.左右のモータとタイヤが等しく,正しい位置に取り付けられていれば,ロボットはまっすぐ進むはずですが,多くの場合,制御をしないと多少なりとも曲がってしまいます.以下の手順で実験を行い,測定データを見て結果をまとめ,軌道の制御をしていないロボットの動きについて考察しましょう.
実験手順
0. PCとロボットをつなぎます.(PCの右側のUSBポートに接続)
- VCforRobodesignerCOM*.exeを実行します.(*はポート番号が入る)
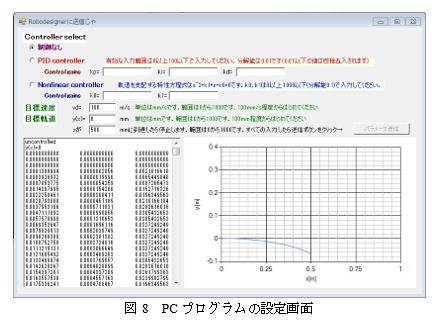
もしも「ポートが見つかりません」というメッセージが出たら,プログラムを終了し,ロボットが正しいポートにつながっているか,プログラムがあっているかを確認してください.正しい組み合わせであることが確認できたら,再びプログラムを実行します.図8のような画面が起動します. - PC画面で「制御なし」を選択します(図8)
- 「パラメータ送信」ボタンをクリックします.表示されたメッセージウィンドウの指示にしたがって,ロボットの周囲を片付けたら,メッセージウィンドウを閉じます.特にUSBケーブルがひっかからないように注意してください.ロボットはタイヤがついている方へ動きます.
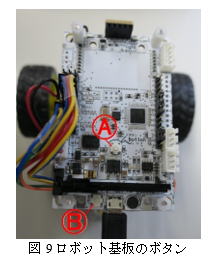
- ロボットの基板の真ん中付近にあるpushボタンを押します(図9 Ⓐ).
0.5秒後にロボットが動き出します.同時に,PC画面にロボットの軌道が表示されます.グラフの原点はpushボタンを押した時点でのロボットの位置であり,そのときのロボットの前方がx軸プラス方向,ロボットの左側がy軸プラス方向です.ロボットはx=500mmに到達すると停止します.
なお,その場旋回などをしてしまうと,x=500mmに到達せずにずっと動き続けます.その場合はリセットボタン(図9 Ⓑ)を押してロボットを止めてください(その際,PC画面にエラーメッセージが出るかもしれませんが,×マークをクリックしてエラーメッセージのウィンドウを閉じてください → 手順6へ). - PC画面のグラフをWindowsのSnipping ToolやPaintなどを用いて保存してください.
なお,データはデスクトップ上の「data.txt」に保存されます.保存されるデータは,1列目から順にx(m),y(m),q(rad),yr (m)です.Excelなどで読み込んで改めてグラフを描きたい人は,ファイル名を変えて保存しておいてください.次にロボットを動かすとdata.txtは上書きされます.Excelなどで描きなおすと,複数のデータを重ねて書くことができますので複数のデータの比較には便利ですし,見やすくなります. - PCのソフトウェアを終了します.
- ロボットのリセットボタンを押します(図9 Ⓑ).←忘れずに!
- 1から7の手順を3回繰り返して,ロボットの軌道を確認してください.
※ 実験を行う場合には,結果や考察しようと思う内容(例えば,次の節の項目)を念頭に,実験条件を変えたり,データを取ったりしてください.
結果と考察
- 結果1
3回走行させたときのx-y平面内での軌道を表すグラフにもとづいて,直線からどれくらい軌道がずれたか,結果のばらつきなどについてまとめましょう.
※毎回同じ方向に曲がりましたか?(再現性)
※実験場所を変えても同じでしたか?(床の状況による違い)
※スタート時のキャスターの向きによって軌道は変わりましたか? - 考察1
実験結果にもとづいて,まっすぐ走らない原因について考察しましょう.
必要に応じて,例えばモータの特性やロボットの機構などについて書籍も調べてみましょう.