環境設定と組立program
開発環境のインストール
ロボットキットに付属CDが入っています.この中の「I部_インストールガイドver301.pdf」の説明にしたがって開発環境を使用するパソコンにインストールします.
作業内容は以下の通りです.コピーやファイルの解凍に時間がかかります.参考として,Windows10のパソコンで実行した際の所要時間例をかっこ内に示します.この間に並行してロボットキットを組み立てると良いです.
1) CDの中のIDE.zipをデスクトップにコピー(3分)
2) デスクトップにコピーしたzipファイルを解凍(15分)
Windows10の場合,zipファイルのアイコン上で右クリックして,
表示されたメニューの「すべて展開」を選べば展開できます
→ 「IDE」というフォルダができます.
3) デバイスドライバ等のコピー(2分)
フォルダ「IDE」の中の「Arduino-IDE」の中の「Windows」の中に「arduino-1.0.5-r2-stemdu12」という
フォルダがあります.このフォルダごと,Cドライブの「Program Files(x86)」の中へ移動します.
4) 起動の確認とショートカットの作成
移動したフォルダ「arduino-1.0.5-r2-stemdu12」の中にarduino.exeがあります.
ダブルクリックすると起動します.なお,デスクトップにショートカットを作っておくと便利です.
ロボットキットの組み立て
 ロボットの前方に赤外線センサを取り付けます.しかし,このキットには赤外線センサを取り付ける専用の冶具がありません.そこで,キットに入っている部品を組み合わせて赤外線センサを固定します.ネジ等でしっかり固定はしませんが,強い外力がかからない分には問題がないと思います.
ロボットの前方に赤外線センサを取り付けます.しかし,このキットには赤外線センサを取り付ける専用の冶具がありません.そこで,キットに入っている部品を組み合わせて赤外線センサを固定します.ネジ等でしっかり固定はしませんが,強い外力がかからない分には問題がないと思います.
基本的な組立作業は,キットの付属CDの「III部_Users Guide Ver320_ロボットセット.pdf」(以下,ガイド)の11-3章から11-4章(p.145-p.148)を見ながら行ってください.センサを取り付けるために変更・補足した部分を以下に青字で示します.
11.3.1 エンコーダ付ギア―ドモータ構造図(p.145)
図を見て確認しておいてください.
11.3.2 走行台車基部組み立て(p.145)
・1の①はガイドのとおり.
・②を行う前に11.3.5タイヤ取付(p.147)を行う(硬くて後から取り付けるのが困難な場合があるため).
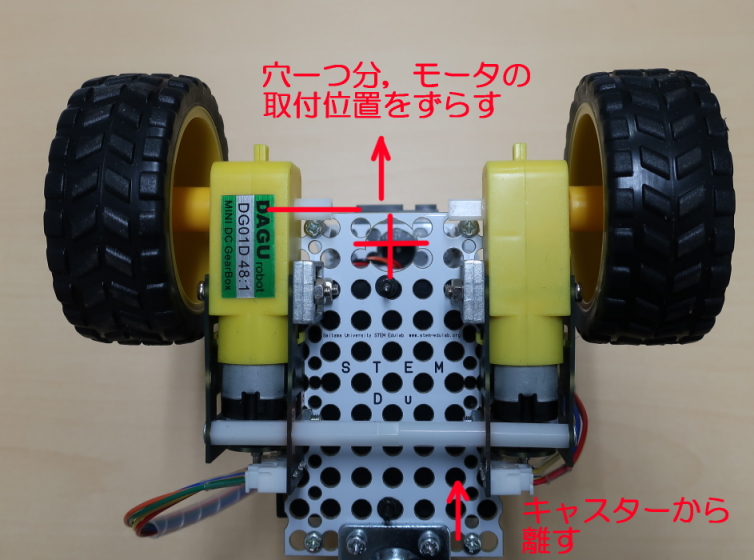
・モータ取り付け位置は,一つずらすのがおすすめ(キャスターとモータユニットがぶつかるのを防ぐため.ただし,ペンをさす穴がずれるので,ペンで正確に絵を描くのはあきらめる.)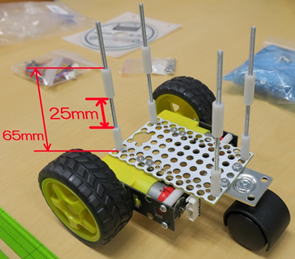
・1の②以降はガイドのとおり.
・11.3.3の前に11.3.4キャスターの取付(p.146)も行う(作業中に置いたときのバランスが良いから).
11.3.3 支柱の組み込み(p.146)
・1.1はガイドのとおり.
・1.2では,2段目の20mmスペーサを支柱ネジにはめる際に一番下まで入れずに1つ目のスペーサと25mm間をあけた位置で止めます(図1参照).
・3段目,4段目のスペーサは使いません.
11.3.6 電池ボックス取付(p.147) ガイドのとおり
11.3.7 ペンホルダ取付(p.147) 今回は不要です
赤外線センサのとりつけ
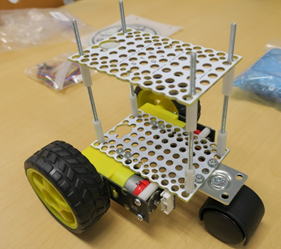
・2枚目のプレートを支柱にさしこみます.支柱を入れる穴の位置を間違えないように気を付けましょう(図2).
・前方(タイヤに近い側)の2つの支柱にナットを一つ入れて,支柱とプレートを固定します.
・支柱のすぐ隣の穴に補修用のM3×15mmのネジをプレートの下から入れ,上から20mmのスペーサを入れてネジを回して固定します.ナットとスペーサの角度を調整して,樹脂スペーサを一番下まで入れてください(図3).


・支柱ネジと樹脂スペーサの間に赤外線センサを入れます.ギリギリの隙間です.支柱に上からナットをはめてセンサを固定します(図4a~4c).

