|
昨年までの様子はこちら ビデオはこちら(Youtubeへ) ページを新規作成(8月16日)
埼玉県川越市で毎年開催される「川越まつり」は,絢爛豪華な江戸型山車が市内を練り歩く姿が有名です.複数の山車が路地で出会うと,互いの技を競い合う「ひっかわせ」が行われます.この光景は祭りの醍醐味になっています.
川越市に位置する東洋大学理工学部では,この川越まつりにちなんだロボットコンテストを2006年から開催してきました. 2年間は新型コロナの感染拡大の影響でオンライン開催でしたが,昨年から再び「かわごえ産業フェスタ」会場で対面で開催しています.今年も賑やかなコンテストになると期待しています.奮ってご参加,ご見学ください! 主 催: 山車ロボットコンテスト実行委員会 (東洋大学理工学部機械工学科内) 共 催: 日本機械学会関東支部埼玉ブロック 開催日時: 11月11日(土) 公開練習日 開場は10:00予定です.競技フィールドでの練習は,13:00〜16:00の予定です. 11月12日(日) コンテスト本番 開場は10:00予定です.競技会は13:00〜16:00頃の予定です. 場 所 : ウェスタ川越(東武東上線川越駅下車 西口から徒歩5分) 内 容 : 山車に見立てた自律型ロボットを指定の位置に移動させて演技を行わせて,演技の芸術性と技術性を競います. 参加資格 : 高校生 ル ー ル : ロボットのCPUはジャパンロボテック社の「ロボデザイナー」に梱包されている基板のみ. 参 加 費 : 無料
競技内容およびルール 山車に見立てて製作した自律型ロボットで以下の演技に挑みます. 競技A「演技つき山車巡行」(従来通り) 競技B「タイムトライアル」(2022年追加競技)
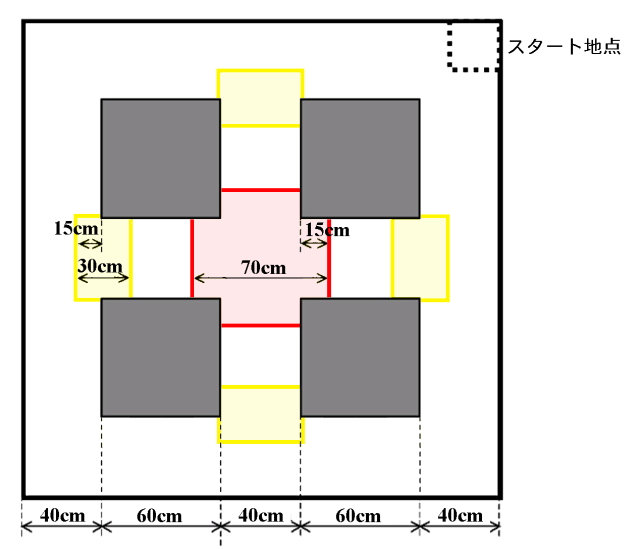
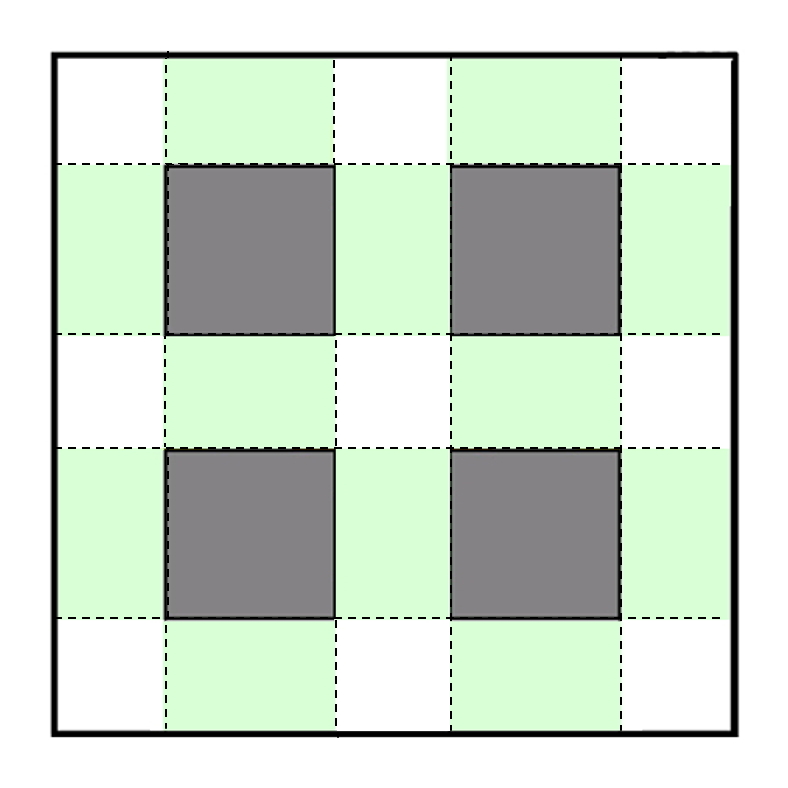
図1 5 つの得点エリア(黄色,赤色枠) 図2 12本の道(緑色の部分)
・図中で,■は高さ15cmの障害物(動かない箱)です. ・図1の中で,赤線で囲まれた正方形,黄色線で囲まれた長方形のエリアが競技Aの「得点エリア」です. ・図2の中で,緑で塗った部分が競技Bでの「道」です. ・床面はパンチカーペットです.競技Aの得点エリアはカラーテープで枠が描いてあり,その上を透明なテープで補強してあります.
・スタート時のロボットのサイズ(幅×奥行き)は25cm×25cm以内とします.高さに制限はありません. ・ロボットはジャパンロボテック社のCPUボードを使用することとします(マイコンなど,別のCPUを使用してはいけません). ・モータ,センサ,バッテリは変更・増設しても構いません.
競技A「演技つき山車巡行」:参加者は以下の2種類の競技を行います.芸術点・技術点を競います. 1.単独競技 一台のロボットで競技を行います. ロボットは,コートの四隅の一箇所を選んでスタートさせます.スタートの向きは自由です. 得点エリア内で何らかのパフォーマンス(演技)を行うと技術点が加算されます. ロボットの外観やパフォーマンスの内容によって,芸術点が加算されます. 一回の競技時間は2分間です. 2分間の間ならば,ロボットをスタート地点に戻して,再スタートをすることができます. 再スタートの前後の技術点は加算しません.再スタート前か,再スタート後のうち点数の高い方を採用します. 2.複数台競技 (山車のひっかわせのような対戦競技です) 複数台のロボットで競技を行います(最大で4台). コートの四隅(4箇所)から,同時に複数のロボットをスタートさせます.スタートの向きは自由です. 単数競技の採点基準に加えて,相手のロボットにぶつかったときにパフォーマンスを行うと技術点が加算されます. 一回の競技時間は2分間です.単独競技と同じく,2分間以内ならば,再スタートをすることができます. 芸術点 行った演技の内容(芸術性)に対して,複数の審査員が一人10点満点でつけます.審査員の合計点で競います. きれいな外装や,おもしろい動きなど,いろいろとアイディアを膨らませてください. 技術点 単独競技,複数台競技の技術点の合計で競います. 図2において,赤線で囲まれた正方形のエリア内にロボットの中心が10秒以上留まり(位置の正確性), 図2において,黄線で囲まれた長方形のエリア内にロボットの中心が10秒以上留まり, 5ヶ所すべてのエリアを経由するまでは,同じエリアで演技を行っても加算はしません. 複数台競技では,ロボット同士がぶつかった場合について「ひっかわせ」として以下の採点基準を追加します. 競技B「タイムトライアル」:希望者のみ参加. 一台のロボットで競技を行います. 競技Aと同じロボットで参加してください.競技中に破損したものは仕方ありませんが,故意に装飾を外してはいけません. スタート位置・向きは,コート内ならば自由です. 12本全ての道を走破する時間を競います. 競技時間は2分間です. 2分間の間ならば,ロボットをスタート地点に戻して,再スタートをすることができます. 技術点 障害物の端から端までの60cmを1本の道とします.端まで走行したらその道を走破したとカウントします. 12本の道を全てをより短時間で走破したロボットを優勝とします. ◆ 備考 競技Aでは技術賞,および芸術賞を,競技Bではタイムトライアル賞をもうけます.
|
|
 2023
2023