GUI program for windows PCprog
Install a GUI program to PC
By using the GUI program, you can change the tracking control law, control
gains, and desired values of a mobile robot that has installed the control program. Furthermore, the measurement data can be collected and the graph are
plotted in real time.
I confirmed that this program run on Windows 7 and Windows 10.
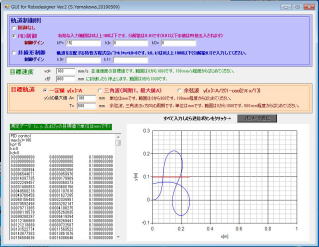 (GUI window of Japanese version)
(GUI window of Japanese version)
Before download, check the number of COM port for the robot in your PC.
If the port number is x, download GUIforRDX25ver2E_COMx.exe. (This program can't check the COM port number automatically)
GUIforRDX25ver2E_COM3.exe
GUIforRDX25ver2E_COM4.exe
GUIforRDX25ver2E_COM5.exe
GUIforRDX25ver2E_COM6.exe
GUIforRDX25ver2E_COM7.exe
GUIforRDX25ver2E_COM8.exe
If Visual Studio 2010 is not installed in your PC, the error "**.dll
was not found" is shown. In this case, download msvcr100d.dll and
put the dll file and the GUI program in the same folder in your PC.
msvcr100d.dll
You can also download the dll from Microsoft official WEB site.
If you want to see the main source files for Visual C++ 2010, download
the following files (The comments in the source files are written in Japanese).
MyForm.cpp
MyForm.h
MyForm.resx
ATTENTION
This GUI program was made by myself. I am a control engineering researcher,
but not a programming expert. So, forgive me if there are some difficulties
to use.
The program uses some interrupt functions. If you use the wrong procedure,
they don't often terminate correctly. It has not caused serious problems
in our circumstance, but please use at your own risk.
Some error messages may be indicated in Japanese.
Execute the programs
1 Connect the robot and PC using USB cable (paying attention to the port number)
2 Power on the robot
3 Start GUI program on PC
4 Select the controller and set all parameters on GUI window
5 Click the send button on GUI window
6 Push the button on the Arduino board of robot
--- The robot moves, and stops automatically---
7 Close GUI window ( to terminate the GUI program)
8 Push the reset button on the Arduino board of robot ( to terminate the control program)
9 For next experiment, go to 3