|
昨年までの様子はこちら ビデオはこちら(Youtubeへ)
ページを新規作成(8月24日)
本番の曜日を修正(9月15日)
埼玉県川越市で毎年開催される「川越まつり」は,絢爛豪華な江戸型山車が市内を練り歩く姿が有名です.複数の山車が路地で出会うと,互いの技を競い合う「ひっかわせ」が行われます.この光景は祭りの醍醐味になっています. 川越市に位置する東洋大学理工学部では,この川越まつりにちなんだロボットコンテストを2006年から開催してきました. 今年は新型コロナウィルス感染防止のため,オンライン開催となります.インターネットを使って東洋大学と参加高校を結んで,複数の会場で遠隔開催します. 主 催: 山車ロボットコンテスト実行委員会 (東洋大学理工学部機械工学科内) 共 催: 日本機械学会関東支部埼玉ブロック(予定) 開催日時: 11月14日(土) コンテスト本番 ※ 本番前に回線の接続確認やリハーサルを実施する予定です.場 所 : 東洋大学,各参加高校 内 容 : 山車に見立てた自律型ロボットを指定の位置に移動させて演技を行わせて,演技の芸術性と技術性を競います. 参加資格 : 高校生 ル ー ル : ロボットのCPUはジャパンロボテック社の「ロボデザイナー」に梱包されている基板のみ. 参 加 費 : 無料
競技内容およびルール(オンライン用) 自律型ロボットに,与えられた競技時間内に,決められた場所で,山車のからくり実演に見立てた自由演技(ダンス,からくりなど)を行わせます.
・左側の壁は十分高いものとします(板等で代用しても構いません). ・図の上下には壁や障害物はないものとします.もし場所の都合で壁や家具等があったとしても,それらに接触したり,距離測定に利用してはいけません.接触した場合は再スタートとします. ・1,2,3,4は得点エリアです.図中の正方形のサイズは40cm×40cmです.したがって,箱と壁の距離は40cmで,例えばエリア3は40cm×80cmです. ・床は平らであるとします.材質は問いません. ・スタート位置と得点エリアの周囲をビニールテープでマークをします.それ以外は床に目印をつけてはいけません(図中の点線は実際のコートには描きません).
・スタート時のロボットのサイズ(幅×奥行き)は25cm×25cm以内とします.高さに制限はありません.スタートした後にアームなどを広げても構いません. ・ロボットはジャパンロボテック社のCPUボードを使用することとします(マイコンなど,別のCPUを使用してはいけません). ・モータ,センサ,バッテリは変更・増設しても構いません.
上記の競技コートで,参加者は以下の競技を行い,芸術点・技術点を競います. 1.個人競技 一台のロボットで競技を行います. ロボットは,上図の青枠(箱Aの右側)にロボット全体が入った状態からスタートさせます.スタート時の向きは自由です. 指定されたエリアに到達して,何らかのパフォーマンス(演技)を行うと技術点が加算されます. ロボットの外観やパフォーマンスの内容によって,芸術点が評価されます. 一回の競技時間は2分間です. 2分間の間ならば,ロボットをスタート地点に戻して,再スタートをすることができます. 再スタートの前後の技術点は加算しません.再スタート前か,再スタート後のうち点数の高い方を採用します. 2.団体競技(複数台参加する高校での対抗戦) 2台のロボットを箱Aの左右に1台ずつおいて,同時にスタートさせます. 単独競技と同様に2台分の点数を加算します. 一回の競技時間は2分間です.単独競技と同じく,2分間以内ならば,再スタートをすることができます. ※ 2台のロボットがぶつからないように工夫しましょう.
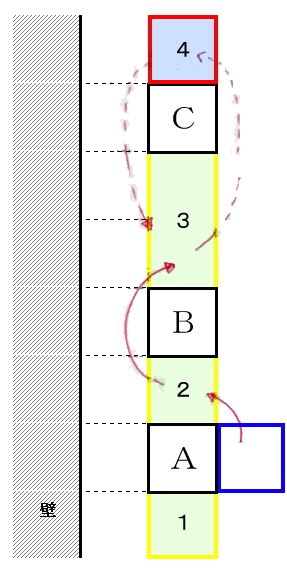
芸術点 行った演技の内容(芸術性)に対して,複数の審査員が一人10点満点でつけます.審査員の合計点で競います. きれいな外装や,おもしろい動きなど,いろいろとアイディアを膨らませてください. 技術点 上図の得点エリア内にロボットの中心が10秒以上留まって(位置の正確性),10秒以上の演技を行えば(動作の安定性),得点が加算されます. ・得点エリア1〜3で演技をした場合の得点は10点です.得点エリア4で演技をした場合の得点は20点です. ・4つの得点エリアすべてで演技をすると,ボーナス点として50点加算されます. ・エリア内で演技を始めても,10秒留まることなく得点エリアから出たり,演技が10秒続かずに途中で止まったりしたときは減点となります. ・同じエリアでパフォーマンスを繰り返しても得点は増えません.別のエリアを経由した後であれば得点が加算されます. 例1:エリア2で演技をした後,一旦,エリア2を出てからすぐにエリア2に入って演技 → 2回目の演技は無得点 例2:エリア2で演技をした後,一旦,(箱Bを一周して=)エリア3を通ってから再びエリア2に入って演技 → 2回目の演技も得点 ◆ 備考 上記の採点基準に従って,技術賞,芸術賞をもうけます.また,これ以外に,審査員特別賞をいくつかもうけます.
|
|
|
|
 2020オンライン
2020オンライン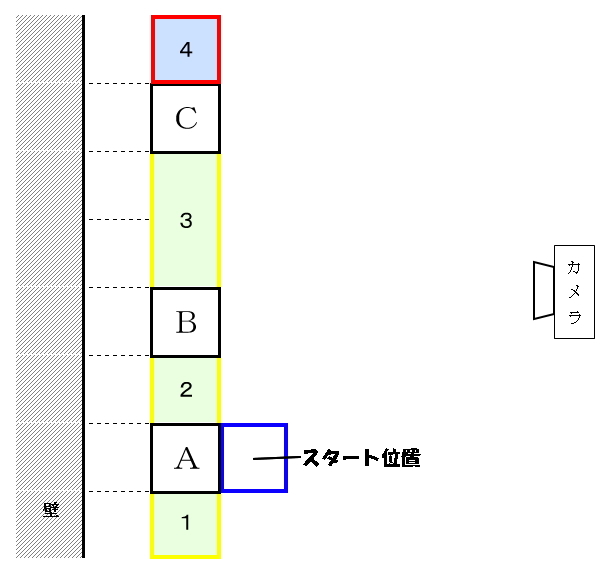 ←競技コート 走行軌道例→
←競技コート 走行軌道例→