研究 (詳しい内容は論文を見ていただくか,ご連絡ください)
内容は順次更新予定です.


↑学内のシーズ展用のポスター(クリックすると拡大できます)
・博士論文の題目は「2-delay制御に関する研究」でした
↑学内のシーズ展用のポスター(クリックすると拡大できます)
・博士論文の題目は「2-delay制御に関する研究」でした
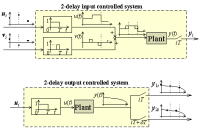 これはサンプル値制御の一種です.例えば,「コンピュータで機械を動かす」のがサンプル値制御系です.
これはサンプル値制御の一種です.例えば,「コンピュータで機械を動かす」のがサンプル値制御系です.2-delay制御では,(制御対象の出力を測定する周期)/(制御入力信号を加える周期)を2または1/2にします.これによって,通常のサンプリングでは,不安定零点の存在のために構成困難であったモデルマッチング,未知入力オブザーバ,強安定化などが可能になります.
・学生の頃に非線形制御系(倒立振子)の研究・実験もしました
 倒立振子は安定化・台車の追従制御・振り上げ制御をやりました.安定化と台車追従では,非線形システムである倒立振子の線形近似モデルにもとづいて制御則を設計しています.振り上げ制御は,振り上げ制御則と安定化を組み合わせたものです.
倒立振子は安定化・台車の追従制御・振り上げ制御をやりました.安定化と台車追従では,非線形システムである倒立振子の線形近似モデルにもとづいて制御則を設計しています.振り上げ制御は,振り上げ制御則と安定化を組み合わせたものです.理論的なものとしては,ポテンシャル関数に注目して,振り上げ制御のための切替え制御則を提案しました.
最近は台車型ではなく,回転するアームの上に振子が乗っている回転型倒立振子を使って実験を行っています.エネルギーにもとづいたスイッチング制御での振り上げを目指しています.
理論的なものとしては,ポテンシャル関数に注目して,振り上げ制御のための切替え制御則を提案しました.
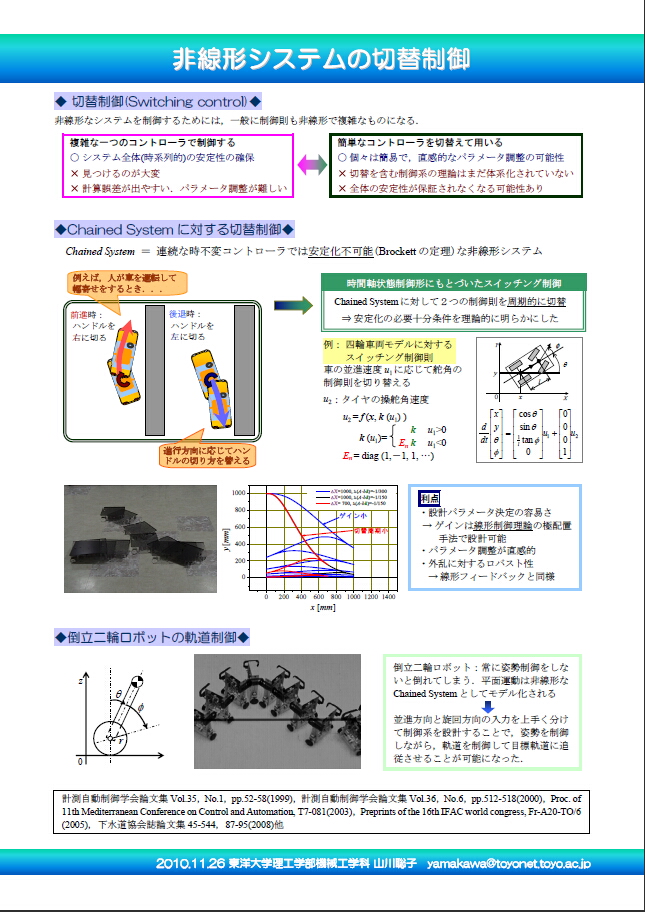
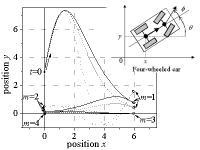
・非線形システムの切替制御を研究しています
 複雑な非線形制御則を用いなくても,簡単な制御則を切替えて用いることで望みの効果が得られることがあります.なるべく簡単な制御理論で非線形システムを制御したいと思っています.
複雑な非線形制御則を用いなくても,簡単な制御則を切替えて用いることで望みの効果が得られることがあります.なるべく簡単な制御理論で非線形システムを制御したいと思っています.Chained systemを「時間軸状態制御形」に変換して制御則を設計するととても簡単な設計が可能になります.しかし,システムに連続時間変化と離散的な切替が混在するハイブリッド制御系になってしまうので,安定性が十分論じられていませんでした.そこで,この切替制御系の2つのモードの対称性を明らかにし,安定化のための必要十分条件を導きました.これは線形制御系に似た比較的簡単な条件として得られました.
制御則を不連続に切替えると,その瞬間に入力が跳ね上がったりもします.上手く切替えなければいけません.切替則の決定が重要です.そこで,最大入力値や出力誤差などを評価にして,切替則を決定することを目指しています.移動ロボットを用いた実験も行いました.
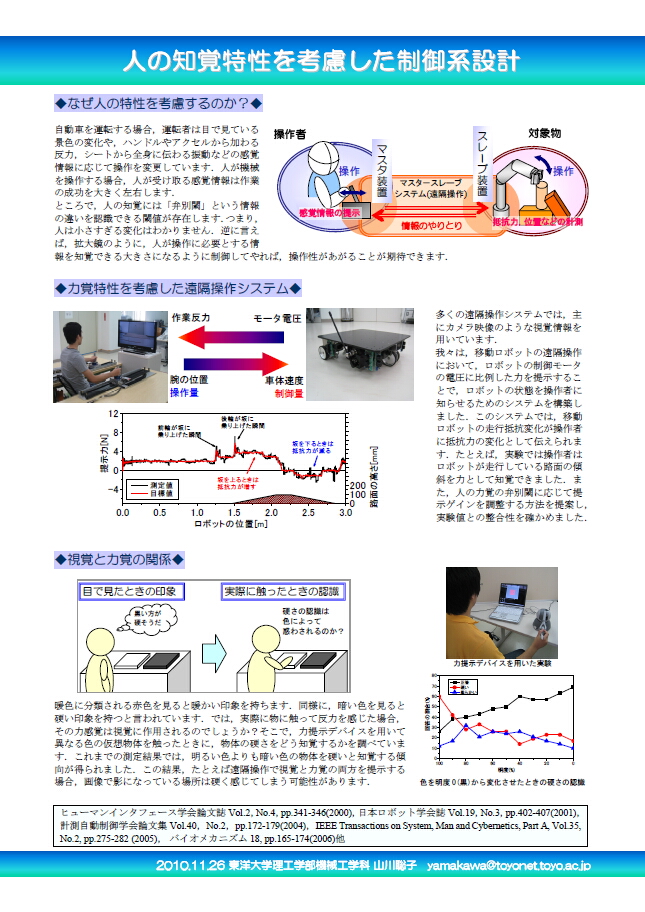
・人の感覚特性の測定とそこから導かれる条件を研究しています
 人の知覚には弁別閾と呼ばれる不感帯が存在します.これは「差が小さすぎて判らない」領域のことです.
人の知覚には弁別閾と呼ばれる不感帯が存在します.これは「差が小さすぎて判らない」領域のことです.力覚フィードバックを用いた操作においては,対象物と装置間での力はスケーリング(拡大縮小)されて操作者に提示されることがあります.弁別閾の測定結果を用いて「判らないほど小さな差」にならないためのスケーリングの条件を導いています.
違いが判ると,今度はどれくらいの大きさに感じているか?ということが気になってきました.人の感覚は,実際の刺激の変化に対して線形に変わるわけではないそうです.これを,ばねを使って測定しました.そして,この場合のスケーリング則を提案しました.
・神経振動子モデルのパラメータと振動生成の関係について研究していました
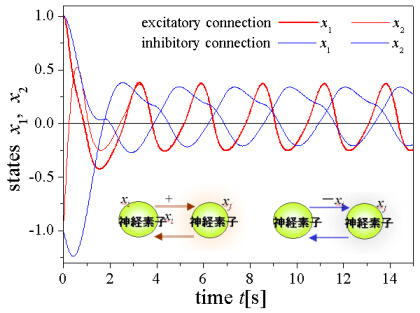 人が周期的な運動をするには,どこかでリズムを生成しているはずです.神経振動子モデルは,複数の神経のモデルを組み合わせで,周期運動を生成することができることが知られています.神経のモデルはとても簡単な数式モデルです.
人が周期的な運動をするには,どこかでリズムを生成しているはずです.神経振動子モデルは,複数の神経のモデルを組み合わせで,周期運動を生成することができることが知られています.神経のモデルはとても簡単な数式モデルです.神経同士の結合は抑制性結合や興奮性結合に分けられます.それぞれについて神経ネットワークでの振動の特徴が変わってきます.これらの特長を固有値などを調べて解析しています.応用として,縄跳びをするロボットのリズム生成を目指しています.