2019年1月 実験動画:
久々に,研究室紹介用に実験動画を編集しました.卒論・修論で学生が行ったビデオです.短時間用なので並列で,一気に動画が流れます.
2014年10月 実験のビデオ:
今年の4年生で七期生目になります.多くの学生が研究,実験をしてきたので実験室も下記のようにキレイなままでもなくなりました.でも,かわりに実験装置はいろいろ動くようになったと思います.その都度,ビデオも撮っていたわけですが,学祭や学科のHPなどで公開しているのに自分のHPにビデオを掲載していなかったことに気付きました.
2008年3月 一期生:
2007年10月から,学部3年生9人が研究室に配属されました.輪講では,本や論文を読んでいます.一方,実験装置の担当学生を決めて,それぞれ動かしてもらっています.一期生は,先輩がおらず,すべて自分達で行わなければならないのでとても大変です.でも,その分,動いたときの感動も格別!なのでがんばってもらいましょう!

上の写真は,学科パンフレット用に撮影しました.春休みだったので,ちょうど実験室にいた人にサクラになってもらいました.
左下の写真は,移動ロボットの遠隔操作用プログラムを作成しているところ.ロボットにカメラつけて動かすと,何だか楽しい.
右下の写真は,買ったばかりのファントム(力提示デバイス)のデモを試しているところ.新しい装置は,まず,遊ぶ!!


2007年3月 new実験室:
2005年4月に赴任して新しい実験室をもらい,装置も動くようにしたのですが,居室の配置の関係で,この年度末に同じ棟の一階上へ引越しすることとなりました.引越しした結果,幸いなことに実験室が広くなりました.また,床の色を白っぽくしてもらったので,明るくて開放感があります.

2006年5月 力提示装置:
やっと,プログラムを修正して力提示ができるようになった.途中,ステップ状の電圧をかけて同定を試みたが,無負荷状態ではあまり高い電圧がかけられないため,静止摩擦の影響が大きく,非線形性が強く出たてしまった.というわけで,モデル同定をあきらめて,誤差の比例制御にしてみた.これが,普通にうまくいった!ということは,PIDにしたり,ゲインを調整したら,結構いいのではという感じ.比例制御だけでも,明らかに軽くor重く感じる.あぁ,モータが制御されているという実感が得られる.

2005年10月25日 車両ロボットのビデオ撮影:
市民講座に向けて車両ロボットのビデオ撮影をしました.わかりやすいプログラムだ( もともと付いていたサンプルプログラムが判りやすかったことと,自分で書いたメイン関数だから).2年ぶりだろうが,パラメータ調整は楽勝.予定通りの時間で撮影終了.なかなかプログラムができない他の装置とは違います.実験室中央は車両ロボットを動かすためにスペースがとってあります.快調に走ります.ビニールテープを貼ってゴール位置をつけたり,ダンボールの障害物を置いたり,やりたい放題です.

2005年8月18日 お盆休み明け:
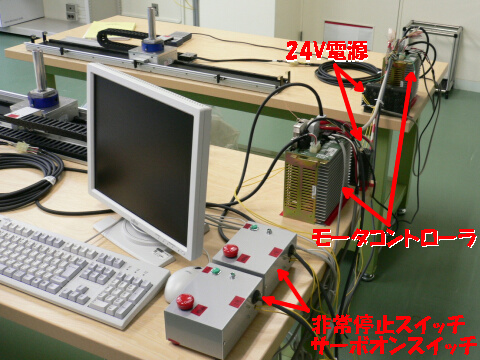
メガスラストモータの配線が終わり,試運転ができました.PCで制御するには今しばらく時間がかかりそうですが,とりあえず,動いて安心した.写真手前のスイッチボックスは,夏休みに実家で兄(電気系出身)に製作・配線してもらいました.
実験室のインターネットも繋がりました.
2005年7月31日のニュースに関連して:
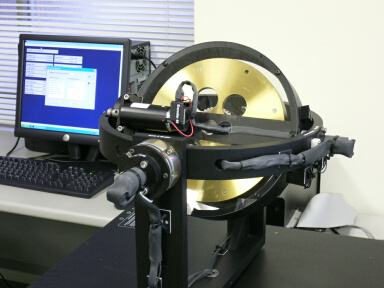
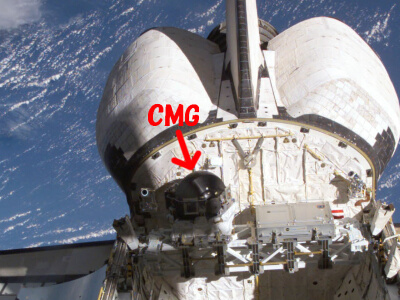
宇宙飛行士の野口総一さんが,国際宇宙ステーション(ISS)の姿勢制御装置「コントロールモーメントジャイロ(CMG)」の取替えをしました.野口さんの2回目の船外活動でした.おぉ,コントロールモーメントジャイロだ.我が実験室に非線形制御の実験用に購入したコントロールモーメントジャイロがあります.ISSに使われているもののように280kgもありません.重力下で一人で持ち上げられるくらいのコンパクトな実験装置です.
ちなみに,ISS用のものはこちら↓(NASAホームページ画像より).黒いカバーのため,中身は見えません.
2005年6月の風景:
6月になって,学科の紹介冊子用に実験室の写真を取りました.それらしくなってきました.でも,まだ手前の装置は配線が完了していません.ハンダ付けしていますが...

2005年4月の風景:
4月に初めて実験室に行くと,こんな感じで装置が箱に入って山積み.う,嬉しい...えへへ.あけるのが楽しみです.
